Are you looking for the Udacity Self Driving Car Nanodegree Review?… If yes, this latest Udacity Self Driving Car Nanodegree Review will help you to decide whether to enroll in the program or not.
So, without further ado, let’s get started-
Udacity Self Driving Car Nanodegree Review
- How are the Content and Projects of Udacity Self Driving Car Nanodegree?
- How Much Time and Money do You Have to Spend in the Udacity Self Driving Car Nanodegree?
- How to Get Udacity Self Driving Car Nanodegree Program at Low Cost?
- Are Instructors Experienced?
- Pros and Cons of Udacity Self Driving Car Nanodegree
- Who Should Enroll in Udacity Self Driving Car Nanodegree?
- Is the Udacity Self Driving Car Nanodegree Worth It?
- Conclusion
You are looking for Udacity Self Driving Car Nanodegree Review, which means you have a doubt about whether to enroll in this program or not.
Right?
And this doubt is common because Udacity Nanodegree Programs are expensive as compared to other MOOCs programs.
So, I will help you to decide whether to invest in this expensive Nanodegree Program or not.
Note- If you are a beginner with no previous knowledge of Python or C++, linear algebra, probability, and statistics, I would not recommend you enroll in Udacity Self Driving Car Nanodegree.
In this case, first, you should enroll in Intro to Self-Driving Cars Nanodegree.
In this article, I will review the Udacity Self Driving Car Nanodegree program on these essential parameters-
- How is the Content Quality of the Udacity Self Driving Car Nanodegree Program?
- What Projects are covered in the program?
- Is the program value for money?
- How are the instructors of the program?
- What do I like and What I don’t like about the Udacity Self Driving Car Nanodegree Program?
- Is Udacity Self Driving Car Nanodegree worth it?
Along with that, I will also share my tips and tricks to save a few bucks while enrolling in the Udacity Self Driving Car Nanodegree.
So, let’s get started and see, How is the Content Quality of the Udacity Self Driving Car Nanodegree?, and What Projects are covered in the program?
How are the Content and Projects of Udacity Self Driving Car Nanodegree?
Udacity Self Driving Car Nanodegree Program is based on projects and various quizzes. You will learn the concepts via quizzes and projects which are quite helpful.
That means after every set of courses, there is a project that you need to submit. And the contractor hired by Udacity reviews your projects.
This Udacity Self Driving Car Nanodegree Program is a good mixture of practical exercises & content to gain skills across a wide array of critical topics, including computer vision, sensor fusion, localization, motion control, and more.
Udacity Self Driving Car Nanodegree Program has 5 courses and 6 projects. And each course has some lessons.
Now, let’s see what topics each course will cover.
Course 1- Computer Vision
In this course, you will learn the fundamentals of Computer Vision.
First, you will understand the machine learning workflow and identify the key stakeholders in an ML problem, frame the ML problem, perform exploratory data analysis on an image dataset, pick the most adequate model for a particular ML task, choose the correct metric, and select and visualize the data.
After that, you will learn sensor and camera calibration such as how to manipulate image data, how to calibrate an image using checkerboard images, how to perform the geometric transformation of an image, and how to perform the pixel-level transformation of an image.
Next, you will learn how to implement a logistic regression model in TensorFlow, how to implement backpropagation, how to implement gradient descent, and how to build a custom neural network for a classification task.
This course will also cover Image Classification with Convolutional Neural Networks and you will learn how to write a custom classification architecture using TensorFlow, how to choose the right augmentations to increase a dataset variability, how to use regularization techniques to prevent overfitting, how to calculate the output shape of a convolutional layer, and how to count the number of parameters in a convolutional network.
In the end, you will learn Object Detection in Images and understand how to use the TensorFlow object detection API, how to choose the best object detection model for a given problem, how to optimize training processes to maximize resource usage, how to implement non-maximum suppression, how to calculate mean average precision, and how to choose hyperparameters to optimize a neural network.
After completing this course, there is one project that you have to complete.
Project 1- Object Detection in an Urban Environment
In this project, you have to create a convolutional neural network to detect and classify objects using data from the Waymo Open Dataset.
For this project, Udacity will provide a dataset containing images of urban environments with annotated cyclists, pedestrians, and vehicles. First, you have to perform an extensive data analysis, including the computation of label distributions, displaying sample images, and checking for object occlusions.
This analysis will inform you to decide what augmentations are meaningful for the project. After that, you have to train a neural network to detect and classify objects. And then, you have to monitor the training with TensorBoard and decide when to end it.
In the end, you have to experiment with different hyperparameters to improve performance.
When you complete this project, the reviewer will review your code and give feedback. The feedback and the peer community will help you throughout the program to clear your doubts.
After submitting this project, you can move forward with the next course.
Course 2- Sensor Fusion
In this course, you will learn the Sensor Fusion and Perception such as how to distinguish the strengths and weaknesses of each sensor. After that, you will learn Lidar Sensor and understand the role of lidar in autonomous driving, how to extract lidar data from the Waymo dataset, how to extract lidar technical properties such as coordinates, and how to visualize lidar data.
Next, you will learn how to detect objects in lidar, how to transform a point cloud into a birds-eye view (BEV), how to perform model inference using BEV images, how to visualize detection results, and how to evaluate object detection performance with metrics and between models.
After that, you will understand Kalman Filters and Extended Kalman Filters. You will learn how to track objects over time with an extended Kalman filter, how to implement motion and measurement models, how to derive a Jacobian for nonlinear models, how to apply appropriate coordinate transforms (e.g. sensor, vehicle coordinates), and how to fuse lidar measurements with camera detections with appropriate camera models.
At the end of this course, you will learn Multi Tracking and how to initialize, update and delete tracks, how to define and implement a track score and track state, how to calculate a simple detection probability/visibility reasoning, and how to associate measurements to tracks for multi-target tracking, how to reduce association complexity through a gating method, and how to evaluate tracking performance through RMSE.
After learning these concepts, you have to work on two projects.
Project 2- 3D Object Detection
In this project, you have to work on 3D object detection. First, you have to load and preprocess 3D lidar point clouds and then use a deep learning approach to detect and classify objects (e.g., vehicles, pedestrians).
After that, you have to evaluate and visualize the objects, including calculating key performance metrics. This project combines with the Sensor Fusion project to form an entire detection pipeline.
Throughout the project, you can clear your doubts with the mentor. They will guide you and review your project code.
After completing this project, there is another project which you have to complete.
Project 3- Sensor Fusion
In this project, you have to solve a challenging multi-target tracking task by fusing camera and lidar detections.
For this project, you have to implement an Extended Kalman filter to track several vehicles over time, including the different measurement models for camera and lidar.
This task also requires a track management module for track initialization and deletion and a data association module to decide which measurement originated from which track.
Next, you have to evaluate and visualize the tracked objects.
To complete this project, you have to use a real-world dataset, exposing them to the everyday challenges of a sensor fusion engineer.
When you complete this project, you can move to the third course of this Nanodegree program.
Course 3- Localization
In this course, you will learn about Localization and understand how a self-driving car might use GPS or detected objects to localize itself in an environment, and how to predict motion to estimate location in a future time step using the bicycle motion model.
After that, you will learn Markov Localization and how to apply the law of total probability to robotic motion, how to derive the general Bayes/Markov filter, and how to implement 1D localization in C++.
Next, you will understand how to create Scan Matching Algorithms, ICP for localization, NDT for localization, and how to implement ICP and NDT for 2D localization in C++.
At the end of this course, you will learn how to utilize Scan Matching in 3D, how to align 3D point cloud maps with ICP, how to align 3D point cloud maps with NDT, and how to create point cloud maps in the CARLA simulator.
This course also has one project, which you need to complete.
Project 4- Scan Matching Localization
In this project, you have to recover the position of a simulated car using lidar with either ICP or NDT, two scan matching algorithms, and aligning point cloud scans from the CARLA simulator.
In this project, you need to achieve sufficient accuracy for the entirety of a drive within the simulated environment, updating the vehicle’s location appropriately as it moves and obtain new lidar data.
The mentor will guide you throughout the project.
Course 4- Planning
In this course, you will learn Behavior Planning and how to think about high-level behavior planning in a self-driving car.
After that, you will learn Trajectory Generation and how to use C++ and the Eigen linear algebra library to build candidate trajectories for the vehicle to follow.
In the end, you will understand Motion Planning and learn how to program a decision-making framework to plan a vehicle’s motion in an urban environment, how to incorporate environmental information into the motion planning algorithm, how to generate an “optimal”, feasible and collision-free path, and how to navigate the vehicle through an urban driving scenario
in simulation following the rules of the road, in a human-like fashion.
In this course, you have to work on one project.
Project 5- Motion Planning and Decision Making for Autonomous Vehicles
In this project, you have to implement two of the main components of a traditional hierarchical planner: the behavior planner and the motion planner.
Both have to work in unison to avoid static objects parked on the side of the road, preventing collision with these objects by executing either a “nudge” or a “lane change” maneuver, navigating intersections, and tracking the centerline on the traveling lane.
After completing this project, you can move to the last course.
Course 5- Control
In this course, you will learn about PID Control and how to recognize the observation of the state of the vehicle (position, velocity), the action (steering, accelerator, brake), and the possible perturbations.
Next, you will understand how to design and code the feedback controller (PID and MPC) for trajectory tracking, using he PID controller, and understanding how to choose the parameters to guarantee stability, and then with the MPC, a more general controller with non-linear dynamics.
In the end, you will learn how to test the controllers and evaluate their robustness to real-world perturbations and how to analyze the differences between the two controllers.
After this course, there is the last project, which you have to complete.
Project 6- Control and Trajectory Tracking for Autonomous Vehicles
In this project, you have to design a PID controller to perform vehicle trajectory tracking.
Given a trajectory as an array of locations and a simulation environment, you have to design and code a PID controller and test its efficiency on the CARLA simulator.
This project will help you understand the power and the limitations of the PID controller while utilizing feedback control.
This project is good training for C++ coding, which is the standard language used in the industry.
So, this is all about the course details and projects. The best thing I found about the Udacity Self Driving Car Nanodegree Program is that they focus on the Practical Aspects as well as the Theoretical part of Self-driving Car Concepts.
The mentor will read all your codes piece by piece, not only the result. This is the unique feature of Udacity.
So, in terms of Content Quality, the Udacity Self Driving Car Nanodegree is worth it. You will learn several new concepts and obviously learn a wide array of critical topics, including computer vision, sensor fusion, localization, motion control, and more.
The mentor is available for answering questions almost instantaneously.
Now, the next parameter you must know is its Pricing. That means whether it is worth the money or not.
So, let’s see the price and duration of the Udacity Self Driving Car Nanodegree Program.
How Much Time and Money do You Have to Spend in the Udacity Self Driving Car Nanodegree?
According to Udacity, the Udacity Self Driving Car Nanodegree Program will take 5 months to complete if you spend 10 hours per week. And for 5 months they cost around $2400.
But Udacity offers two options- One is either pay the complete amount upfront or you can pay monthly installments of $300/month.
I know the Udacity Self Driving Car Nanodegree Program is expensive as compared to other MOOCs. At this price, I would say this is not worth it. Because you can learn these topics separately from other MOOCs.
But if you get the Udacity Self Driving Car Nanodegree Program at a low cost by applying for some discount or Scholarship, then you can go for it.
Do you want to know what are these tricks to get the Udacity Self Driving Car Nanodegree Program at a low cost?
So, let’s see the three methods which you can use to get the Udacity Self Driving Car Nanodegree at a low cost.
How to Get Udacity Self Driving Car Nanodegree Program at Low Cost?
These 3 methods are-
- Get Some Discounts
- Apply for Udacity Scholarship
- Complete the whole Nanodegree in less time.
1. Get Some Discounts
Most of the time, Udacity offers some discounts. When they offer a discount, it appears something like that-
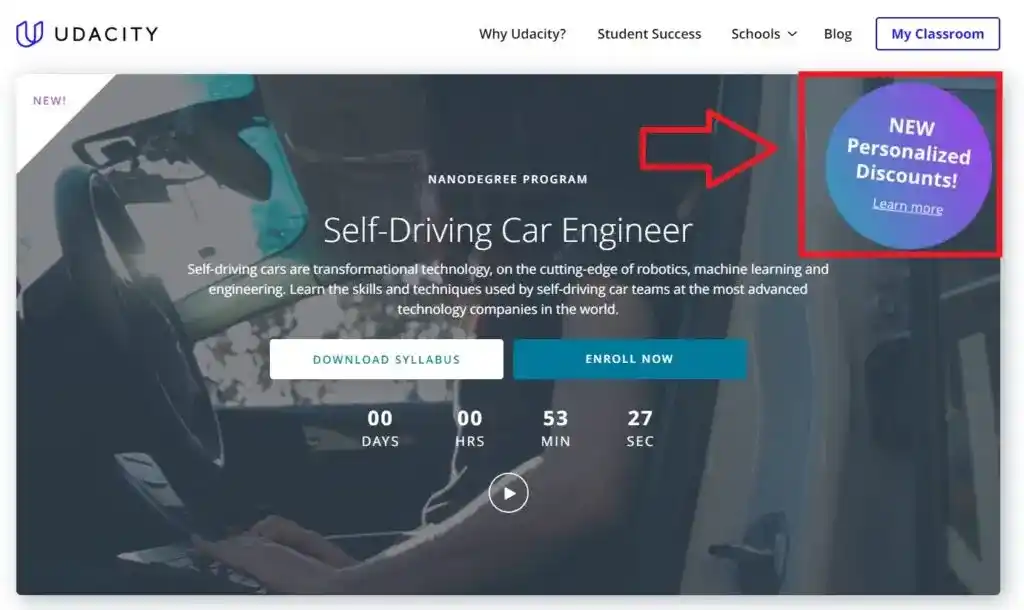
When you click on the “New Personalized Discount”, you will be asked to answer 2 questions.
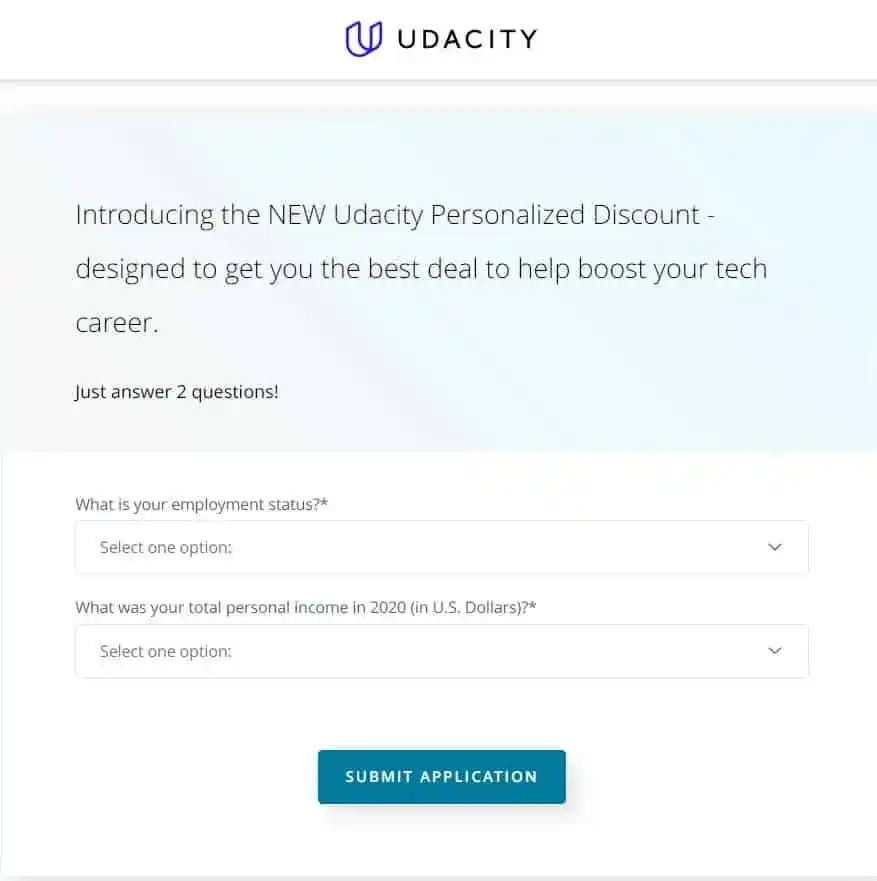
After answering these two questions, press the “Submit Application” button. And then you will get a discount with a unique Coupon Code. Simply copy this code and paste it at the time of payment.
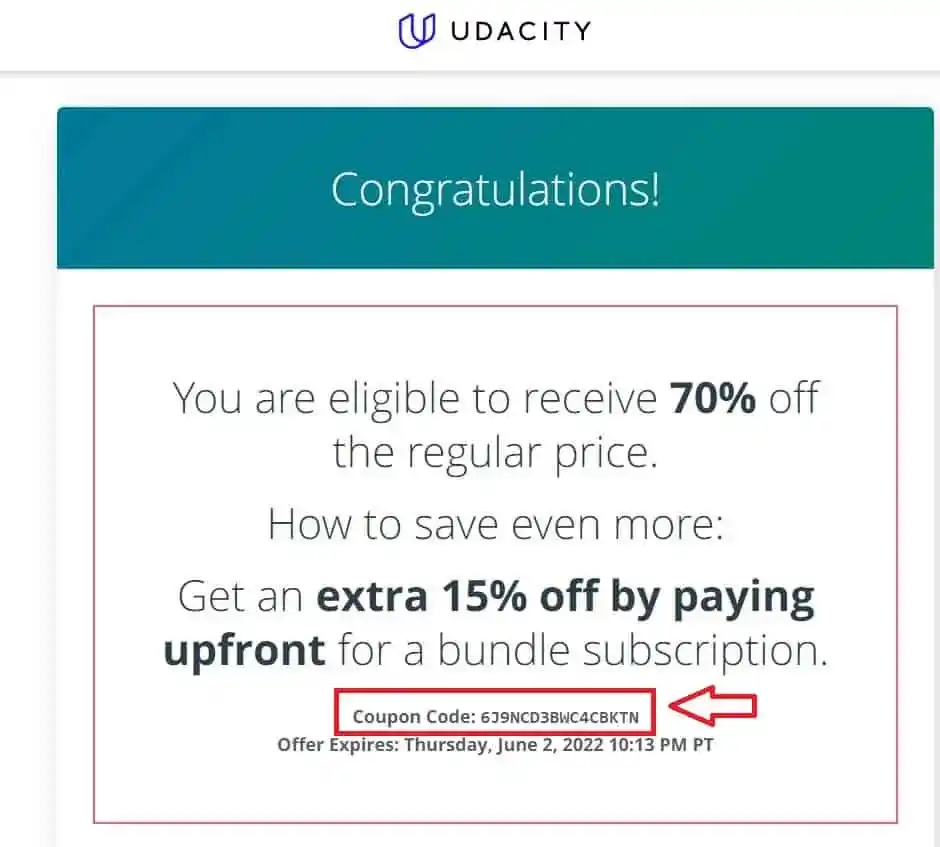
You need to apply the coupon provided by Udacity at the time of checkout. And you will get a discount on the Udacity Self Driving Car Nanodegree Program. So to get a discount on Udacity, you need to wait for their sale.
You can check the current Discount of Udacity here.
2. Apply for Udacity Scholarship
To apply for Udacity Scholarship, you need to go on their Scholarship page, which looks like something like that-
On this page, you have to find the scholarship for the program you want to enroll in. If you found your Nanodegree program on the list, then you need to apply for the scholarship by filling out these details-
- Background Information
- Prerequisite Knowledge
- Your Goals
- Additional Questions
In the background information section, they will ask about your Country, Age, Gender, ethnicity, the highest level of education, current job role, years of professional experience, and how many hours can you dedicate to the program per week?
The prerequisite Knowledge section varies depending on the Nanodegree program you are applying for.
In the Goals section, you have to tell your primary purpose in participating in this scholarship program, what you hope to accomplish through this program?, and Why should you receive a scholarship?.
In the last section which is Additional Questions, you have to agree to their terms and conditions.
You should fill the Goals section very carefully so that you increase your chance of getting a scholarship.
After filling out these details, you need to click on the “Save and Submit“ button. And by doing so, you have applied for Udacity Scholarship. And if you are selected, then you will be notified via email.
But if your program is not listed in the scholarship section, then you fill out this form on the Scholarship page section-
So, whenever the scholarship will available, you will be notified. I hope now you understood the procedure.
3. Complete the whole Nanodegree in less time
To complete the Udacity Self Driving Car Nanodegree program in less time, you need to manage your time productively.
You need to plan your day before and create a to-do list for each day. And you need to spend a good amount of time daily on the program.
According to Udacity, you need to spend 10 hours per week to complete the whole program in 5 months.
Right…?
That means, daily you need to spend approx 1.5 hours, but if you double the time and give daily 3 hours, then you can complete the whole Nanodegree program in approx 2 months.
To manage your time and avoid any distractions, you can use the Pomodoro technique to increase your learning.
And you can also implement the project phases after watching the related lecture. By doing this way, you can save your time by watching one video two times. One at the time of learning and the second at the time of working on the project.
I hope these tips will help you to complete the Udacity Self Driving Car Nanodegree in less time. And you can save your three-months fees.
If you get Udacity Self Driving Car Nanodegree at a low cost by following these methods, then I would say it is worth it.
The next parameter, I always check is the Instructors of the course. This is an important parameter, you should not avoid this parameter. Because, if the instructors are not experienced, then how they can teach the concepts.
So, let’s see how are the instructors of the Udacity Self Driving Car Nanodegree.
Are Instructors Experienced?
- Thomas Hossler– Thomas is originally a geophysicist but his passion for Computer Vision led him to become a Deep Learning Engineer at various startups. By creating online courses, he is hoping to make education more accessible. When he is not coding, Thomas can be found in the mountains skiing or climbing.
- Antje Muntzinger– Antje Muntzinger is a technical lead for sensor fusion at Mercedes-Benz. She wrote her Ph.D. in sensor fusion for advanced driver assistance systems and holds a diploma in mathematics. By educating more self-driving car engineers, she hopes to realize the dream of fully autonomous driving together in the future.
- Andreas Haja– Andreas Haja is an engineer, educator, and autonomous vehicle enthusiast with a Ph.D. in computer science. Andreas now works as a professor, where he focuses on project-based learning in engineering. During his career with Volkswagen and Bosch, he developed camera technology and autonomous vehicle prototypes.
- Aaron Brown– Aaron has a background in electrical engineering, robotics, and deep learning. Currently working with Mercedes-Benz Research & Development as a Senior AV Software Engineer, he has worked as a Content Developer and Simulation Engineer at Udacity focusing on developing projects for self-driving cars.
- Munir Jojo Verge– Before MITRE, Munir was a Motion Planning & Decision-Making Manager at Amazon. He also worked for 2 Self-driving car companies and for WaltDisney Shanghai building TronLightcycle. Munir holds a B.Eng. in Aerospace, an M.S. in Physics, and an M.S. in Space Studies.
- Mathilde Badoual– Mathilde has a strong background in optimization and control, including reinforcement learning, and has an engineering diploma from the electrical engineering school Supelec, in France. Previously she worked at Tesla in the energy and optimization team.
- David Silver– Prior to working as a Senior Software Engineer in the autonomous vehicle industry, David Silver led the School of Autonomous Systems at Udacity. David was also a research engineer on the autonomous vehicle team at Ford. He has an MBA from Stanford, and a BSE in computer science from Princeton.
As you saw, all instructors of Udacity Self Driving Car Nanodegree are experienced and knowledgeable. And learning from such instructors is helpful. That is the reason I love Udacity.
So, in terms of Instructors, I would say Udacity Self Driving Car Nanodegree is worth it.
Now, let’s see the Pros and Cons of the Udacity Self Driving Car Nanodegree Program–
Pros and Cons of Udacity Self Driving Car Nanodegree
Pros-
- All classes are very clear and well prepared.
- The project review feedback helps to improve & get customized direction.
- This program puts the knowledge into practice through real-world exercises.
- You will work on a project to create a convolutional neural network to detect and classify objects using data from the Waymo Open Dataset.
- You will get an opportunity to run your code on the open-source simulator CARLA.
- You will work on Tensorflow version 2+, Python version 3, and C++ version 14.
- You will get Technical mentor support and the mentor will guide you from the start of your Nanodegree program until you finish the whole program.
- Udacity provides a great community for help. They have a Stackoverflow-style Q&A forum for people who are stuck with assignments.
Cons-
- After completing the Nanodegree program, you can’t access the course material. Maybe Udacity does this to avoid misuse.
- Udacity doesn’t have any IOS and android apps. So, you can’t study on your smartphones and outside the house.
- Udacity Nanodegree program is expensive as compared to other MOOCs platforms.
So, these are the Pros and Cons of the Udacity Self Driving Car Nanodegree. Now, let’s see who should enroll in this Udacity Self Driving Car Nanodegree –
Who Should Enroll in Udacity Self Driving Car Nanodegree?
Udacity Self Driving Car Nanodegree is not for beginners. This is an advanced-level program. You can enroll in this program if you can-
- Build object-oriented programs in Python or C++.
- Compute integrals and derivatives of polynomial functions.
- Multiply matrices and understand related aspects of linear algebra.
- Calculate the mean, median, and standard deviation of a dataset.
- Model the effects of forces on point masses.
If you already knew this, you can enroll in Udacity Self Driving Car Nanodegree. And if you are a beginner, I would suggest you, first, enroll in Intro to Self-Driving Cars Nanodegree.
After considering all the parameters, it’s time to answer-
Is the Udacity Self Driving Car Nanodegree Worth It?
Yes, it is worth it for those who are interested in obtaining a job within the field of autonomous systems or refreshing or developing their skills within the realm of machine and deep learning, systems integration, and sensor fusion. This Udacity Self Driving Car Nanodegree covers six projects to sharpen your knowledge. You will also get One-to-One Mentorship to clear your doubts while working on projects.
Now it’s time to wrap up this Udacity Self Driving Car Nanodegree Review.
Conclusion
I hope this Udacity Self Driving Car Nanodegree Review helped you to decide whether to enroll in this program or not.
If you found this Udacity Self Driving Car Nanodegree Review helpful, you can share it with others. And if you have any doubts or questions, feel free to ask me in the comment section.
All the Best!
You May Also be Interested In
Best Resources to Learn Computer Vision (YouTube, Tutorials, Courses, Books, etc)- 2026
Best Certification Courses for Artificial Intelligence- Beginner to Advanced
Best Natural Language Processing Courses Online to Become Expert
Best Artificial Intelligence Courses for Healthcare You Should Know in 2026
What is Natural Language Processing? A Complete and Easy Guide
Best Books for Natural Language Processing You Should Read
Augmented Reality Vs Virtual Reality, Differences You Need To Know!
What are Artificial Intelligence Examples? Real-World Examples.
Thank YOU!
Explore more about Artificial Intelligence.
Though of the Day…
‘ It’s what you learn after you know it all that counts.’
– John Wooden

Written By Aqsa Zafar
Aqsa Zafar is a Ph.D. scholar in Machine Learning at Dayananda Sagar University, specializing in Natural Language Processing and Deep Learning. She has published research in AI applications for mental health and actively shares insights on data science, machine learning, and generative AI through MLTUT. With a strong background in computer science (B.Tech and M.Tech), Aqsa combines academic expertise with practical experience to help learners and professionals understand and apply AI in real-world scenarios.